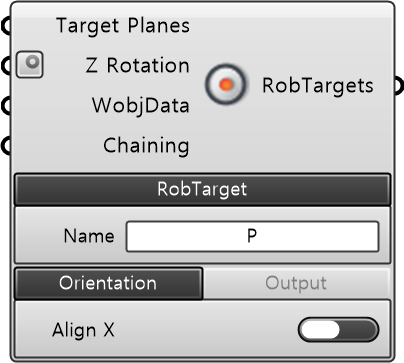
Defines a RobTarget for robot-only motions without external axes. External axis values are automatically initialized to 9E9 (unused).
| Inputs
Name
Type
Description
Target Planes
Plane
The reference planes to be converted into RobTarget data.
Z Rotation
Number
Rotates the RobTarget around its local Z-axis (Unit: Degrees).
WobjData
WobjData
ABB Work Object coordinate system.
Chaining
Boolean
Locks the relationship between the Work Object (WorkObj) and the target (RobTarget). When the Work Object is modified in the viewport, the target’s position and orientation update accordingly.
| Required Parameters
Name
Type
Description
Name
String
Defines the identifier name for the generated `RobTarget` variable. This variable acts as a unique identifier to store the robot's target position and orientation.
Name
Type
Description
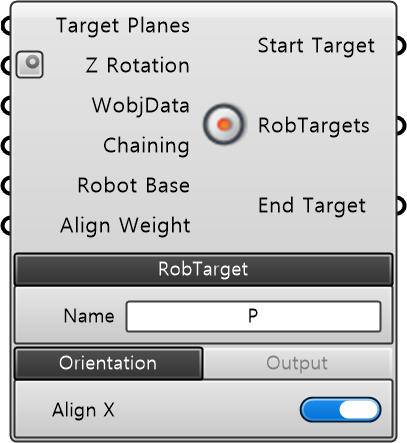
Align X
String
Enables orientation interpolation adjustment so that the +X axis of the `RobTarget` faces the Robot Base origin. Activating this option introduces additional inputs: 'Robot Base' (Plane) and 'Align Weight' (0 = original, 1 = fully aligned).
Name
Type
Description
Split Start
String
Extracts and outputs the data corresponding to the first index within each branch of the input `TargetPlane` data stream.
Split End
String
Extracts and outputs the data corresponding to the last index within each branch of the input `TargetPlane` data stream.
| Outputs
Name
Type
Description
Start Targets
RobTarget
Outputs the ABB RAPID RobTargets code corresponding to the first data branch.
RobTargets
RobTarget
Outputs the main ABB RAPID RobTargets motion code sequence.
End Targets
RobTarget
Outputs the ABB RAPID RobTargets code corresponding to the last data branch.