Positioner RobTarget
🌐 EN
Description
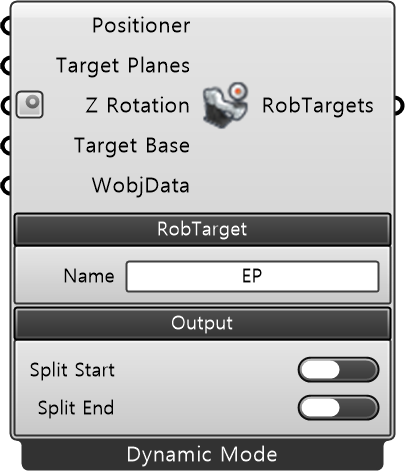
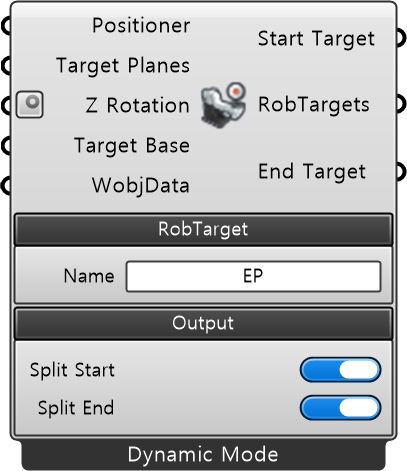
Positioner Robtarget은 포지셔너(외부축) 회전각을 포함한 RobTarget을 정의한다. 컴포넌트 아이콘을 우클릭하여 Dynamic, Static 모드로 전환하여 사용할 수 있다.
| 입력(Inputs)
Dynamic 모드
| 이름 | 타입 | 설명 |
|---|---|---|
| Positioner | Positioner | ABB Positioner |
| Target Planes | Plane | RobTarget으로 변환할 평면 |
| Z Rotation | Angle | RobTarget을 자기 자신의 Z축 기준으로 회전 (단위: 도) |
| Target Base | Plane | 입력된 Target Plane이 정의된 기준 평면. 입력된 Target Plane은 이 평면을 기준으로, Positioner의 Mounting Plane에 오리엔트 된 RobTarget을 정의 |
| WobjData | WobjData | ABB 작업 평면 좌표계를 기준으로 Target Plane 재정의한다. (선택) |
| 필수 파라미터 (Required Parameter)
| 이름 | 타입 | 설명 |
|---|---|---|
| Name | String | 생성할 `RobTarget` 변수의 명칭을 정의. 해당 변수는 로봇의 목표 위치 및 자세를 저장하는 고유 식별자로 사용 |
| 이름 | 타입 | 설명 |
|---|---|---|
| Split Start | String | 입력 데이터 `TargetPlane`의 각 브랜치(Branch) 내 첫 번째 인덱스(First Index)에 해당하는 데이터를 추출하여 출력 |
| Split End | String | 입력 데이터 `TargetPlane`의 각 브랜치(Branch) 내 마지막 인덱스(Last Index)에 해당하는 데이터를 추출하여 출력 |
| 출력(Outputs)
| 이름 | 타입 | 설명 |
|---|---|---|
| Start Targets | RobTarget | ABB Rapid RobTargets 첫번째 브랜치 데이터 출력 |
| RobTargets | RobTarget | ABB Rapid RobTargets 데이터 출력 |
| End Targets | RobTarget | ABB Rapid RobTargets 마지막 브랜치 데이터 출력 |