Positioner RobTarget
🌐 KR
Description
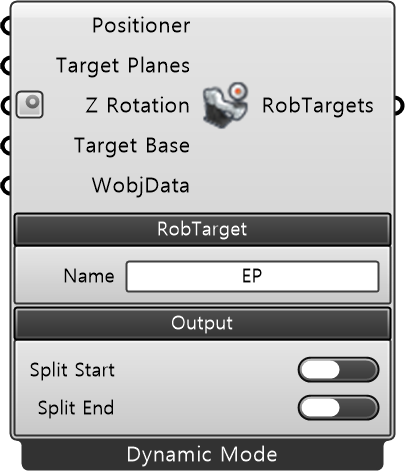
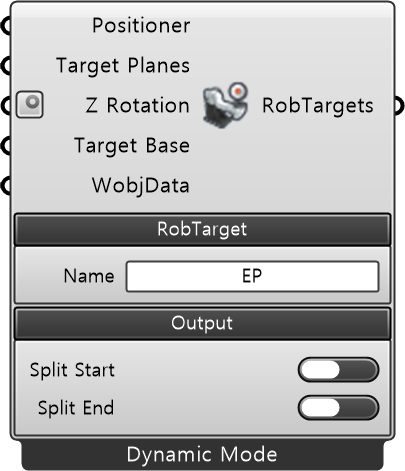
Based on the positioner-specific RobTarget, this component assists users in generating custom positioner RAPID code. Users can toggle between Dynamic and Static modes via the right-click context menu.
| Inputs
Dynamic Mode
| Name | Type | Description |
|---|---|---|
| Positioner | Positioner | ABB Positioner instance. |
| Target Planes | Plane | Target planes to be converted into RobTargets. |
| Z Rotation | Angle | Rotates the RobTarget around its local Z-axis (Unit: Degrees). |
| Target Base | Plane | The reference coordinate plane where the input Target Plane is defined. The input Target Plane defines the oriented RobTarget on the Positioner’s Mounting Plane based on this reference plane. |
| WobjData | WobjData | ABB Work Object data coordinate system. |
| Required Parameter
| Name | Type | Description |
|---|---|---|
| Name | String | Defines the variable name of the generated RobTarget. This variable serves as a unique identifier to store the target position and orientation of the robot. |
| Name | Type | Description |
|---|---|---|
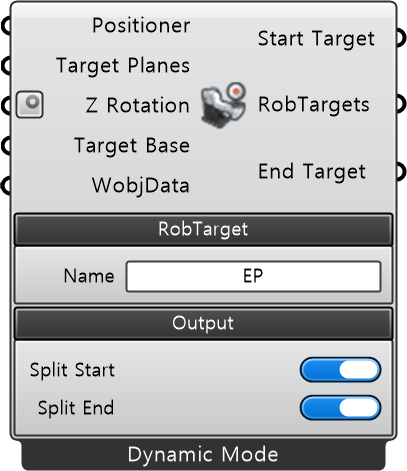
| Split Start | String | Extracts and outputs the data corresponding to the first index within each branch of the input TargetPlane data structure. |
| Split End | String | Extracts and outputs the data corresponding to the last index within each branch of the input TargetPlane data structure. |
| Outputs
| Name | Type | Description |
|---|---|---|
| Start Targets | RobTarget | Outputs the ABB Rapid RobTargets code corresponding to the first branch index. |
| RobTargets | RobTarget | Outputs the complete compiled ABB Rapid RobTargets code sequence. |
| End Targets | RobTarget | Outputs the ABB Rapid RobTargets code corresponding to the last branch index. |