Positioner
🌐 EN
Description
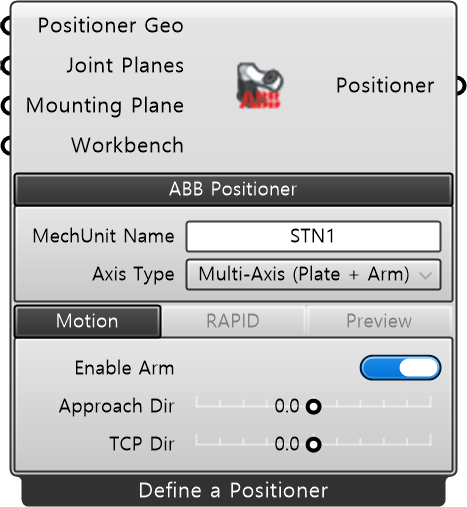
컴포넌트 아이콘 우클릭 후, [Define Positioner] 선택시 노출. 포지셔너 장치의 기구학 구성 정의.
| 입력(Input)
| 이름 | 타입 | 설명 |
|---|---|---|
| Positioner Geo | Mesh | 포지셔너 각 링크의 형상 메시. |
| Joint Planes | Plane | 고정 베이스부터 플랜지까지 포지셔너의 기구학 체인을 순서대로 정의하는 평면 리스트. 고정 기준 좌표계(Base) - 각 회전축 좌표계(J1, J2, …) - 워크밴치/워크피스 부착면(Flange)에 순서대로 설정.(즉, N축 포지셔너의 경우 총 N+2개 평면 입력 필요.) |
| Mounting Plane | Plane | 포지셔너의 플랜지 평면. 워크벤치(작업대)가 장착되는 상단 기준면. 기본값: WorldXY. |
| Workbench | Workbench | 포지셔너 플랜지에 장착되는 워크벤치(작업대) 정의 (선택). |
| 필수 파라미터 (Required Parameter)
| 이름 | 타입 | 설명 |
|---|---|---|
| MechUnit Name | String | 포지셔너(MechUnit) 변수명 |
| Axis Type | String | ABB 포지셔너 모델 |
| 이름 | 타입 | 설명 |
|---|---|---|
| Enable Arm | Toggle | 포지셔너의 암 동작 활성화 |
| Approach Dir | Number | 포지셔너 기준 TCP의 접근 방향. 포지셔너가 이 방향으로의 접근을 기준으로 회전 자세 결정. |
| TCP Dir | Number | 포지셔너가 최종적으로 정렬시킬 TCP의 방향 |
| 이름 | 타입 | 설명 |
|---|---|---|
| Arm Joint Index | String | 포지셔너 암(Arm) 축 각도를 할당할, RobTarget 내부 ExtJoint 배열의 인덱스 (1~6). 다른 외부축 인덱스와 중복 불가. "- 예: Arm = 2, Plate = 3 → ExtJoint [9E9, arm, plate, 9E9, 9E9, 9E9] |
| Plate Joint Index | String | 포지셔너 플레이트(Plate) 축 각도를 할당할 RobTarget ExtJoint 배열의 인덱스 (1~6). 다른 외부축 인덱스와 중복 불가. - 예: Arm = 2, Plate = 3 → ExtJoint [9E9, arm, plate, 9E9, 9E9, 9E9] |
| 이름 | 타입 | 설명 |
|---|---|---|
| Color | Color | 시각화 색상 |
| 출력(Output)
| 이름 | 타입 | 설명 |
|---|---|---|
| Positioner | Positioner | 로봇과 연동할 외부축 포지셔너 (Positioner). |