RealTimeDisplay
🌐 EN
Description
- RealTimeDisplay는 실제 혹은 가상의 로봇 ID와 연결하여, 연결된 로봇의 움직임을 GERTY 시뮬레이션 움직임과 동기화 하여 관찰 할 수 있는 컴포넌트이다.
Input
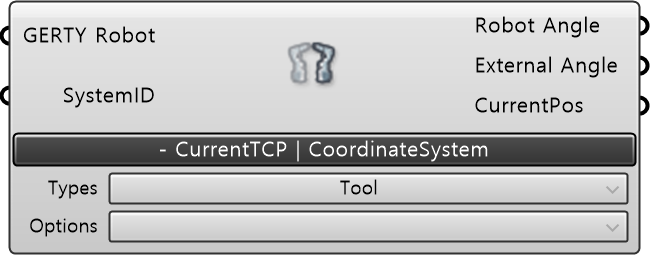
- GERTY Robot: 로봇 컴포넌트 데이터를 입력받는다.
- SystemID : 로봇 컨트롤러 데이터를 입력받는다.
Built-in Param | CurrentTCP
- Types: 실제 로봇에 장작된 정보를 읽어 온다. 기본 값은 Tool
- Options: 출력할 로봇의 정보 옵션을 선택할 수 있다.
Output
- Robot Angle : 로봇 각 축의 각도 값을 가져와 출력한다.
- External Angle : 부가축의 각도 값을 가져와 출력한다.
- CurrentPos: 로봇의 현재 자세를 출력한다.
How To Use
- 다음은 RealTimeDisplay 컴포넌트 사용시 마주할 수 있는 예시이다.
