RobTarget
🌐 EN
Description
외부축 없이 로봇 단독 모션을 위한 RobTarget 정의한다. 외부축 값은 9E9(미사용)로 자동 설정된다.
| 입력(Inputs)
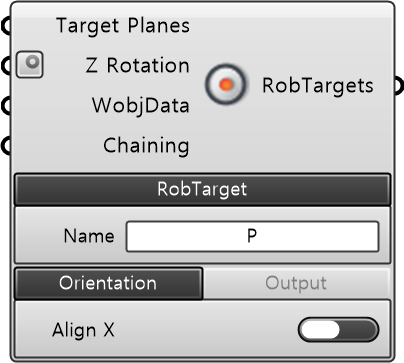
Algin 비활성화 모드
| 이름 | 타입 | 설명 |
|---|---|---|
| Target Planes | Plane | RobTarget으로 변환할 평면 |
| Z Rotation | Number | RobTarget을 자기 자신의 Z축 기준으로 회전한다. (단위 : 도) |
| WobjData | WobjData | ABB 작업 평면 좌표계 |
| Chaining | Boolean | 작업평면(WorkObj)과 타겟(RobTarget) 관계를 고정하낟. 뷰포트 상에서 작업평면 변경 시 타겟 위치와 방향도 변경할 수 있다. |
Algin 활성화 모드
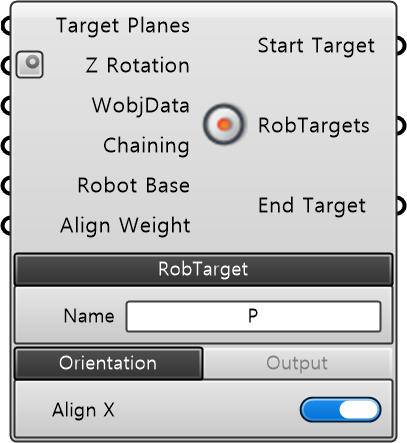
| 이름 | 타입 | 설명 |
|---|---|---|
| Target Planes | Plane | RobTarget으로 변환할 평면 |
| Z Rotation | Number | RobTarget을 자기 자신의 Z축 기준으로 회전한다. (단위 : 도) |
| WobjData | WobjData | ABB 작업 평면 좌표계 |
| Chaining | Boolean | 작업평면(WorkObj)과 타겟(RobTarget) 관계를 고정하낟. 뷰포트 상에서 작업평면 변경 시 타겟 위치와 방향도 변경할 수 있다. |
| Robot Base | Plane | RobTarget의 +X축이 향할 기준 좌표계. 이 Plane의 원점이 정렬 타겟점이 되며, 일반적으로 로봇의 베이스 좌표계를 입력. |
| Align Weight | Number | 원본 자세와 완전 정렬 자세 사이의 보간 비율. 0 = 원본 RobTarget 자세 유지, 1 = +X축이 Robot Base 원점을 완전히 향하도록 정렬. |
| 필수 파라미터 (Required Parameter)
| 이름 | 타입 | 설명 |
|---|---|---|
| Name | String | 생성할 `RobTarget` 변수의 명칭을 정의. 해당 변수는 로봇의 목표 위치 및 자세를 저장하는 고유 식별자로 사용 |
| 이름 | 타입 | 설명 |
|---|---|---|
| Align X | String | RobTarget의 +X축이 Robot Base 원점을 향하도록 자세를 보간 보정하는 옵션 활성화. 'Robot Base'(Plane)와 'Align Weight'(0 = 원본, 1 = 완전 정렬) 인풋이 추가됨 |
| 이름 | 타입 | 설명 |
|---|---|---|
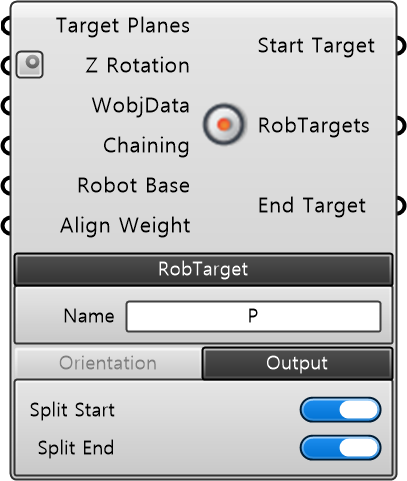
| Split Start | String | 입력 데이터 `TargetPlane`의 각 브랜치(Branch) 내 첫 번째 인덱스(First Index)에 해당하는 데이터를 추출하여 출력 |
| Split End | String | 입력 데이터 `TargetPlane`의 각 브랜치(Branch) 내 마지막 인덱스(Last Index)에 해당하는 데이터를 추출하여 출력 |
| 출력(Outputs)
| 이름 | 타입 | 설명 |
|---|---|---|
| Start Targets | RobTarget | ABB Rapid RobTargets 첫번째 브랜치 코드 출력 |
| RobTargets | RobTarget | ABB Rapid RobTargets 코드 출력 |
| End Targets | RobTarget | ABB Rapid RobTargets 마지막 브랜치 코드 출력 |