RealTimeDisplay
🌐 KR
Description
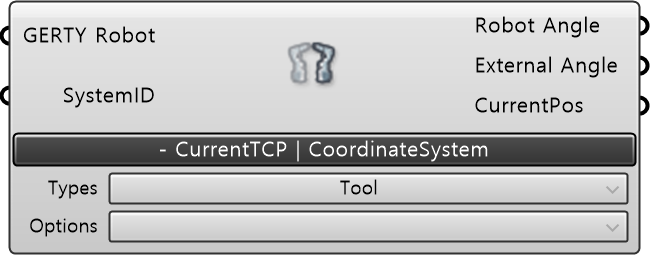
- RealTimeDisplay is a component that connects with the actual or virtual robot ID, allowing you to observe the movements of the connected robot synchronized with the GERTY simulation movements
Input
- GERTY Robot: Receive robot component data.
- SystemID : Receive robot controller data.
- Unit : Receive input of robot unit data.
- Signals : Collect signal information.
Built-in Param | CurrentTCP
- Types: Reads data from the components installed on the actual robot. Default value is ‘Tool’.
- Options: Choose output options for robot data.
Output
- Robot Angle : Fetches and displays the angle values for each axis of the robot.
- External Angle : Fetches and displays the angle values of the additional axes.
- CurrentPos: Outputs the current pose of the robot.
How To Use
The following examples illustrate typical usage scenarios of the RealTimeDisplay component.
