ReadAndWriteMOCData
🌐 KR
Description
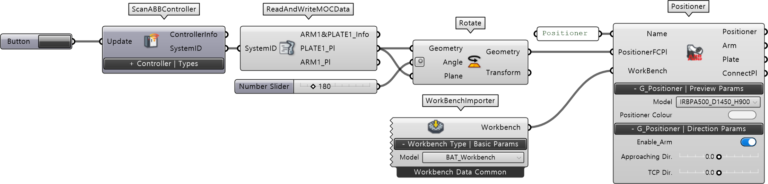
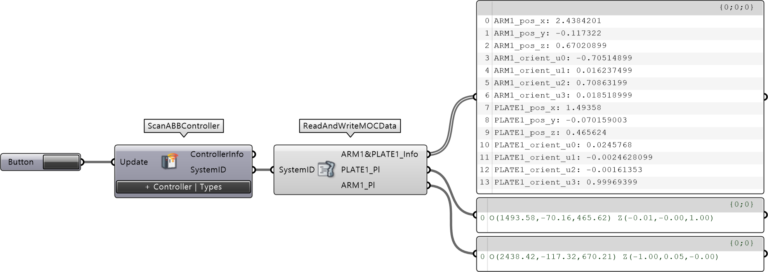
- ReadAndWriteMOCData is a component that outputs the information of the virtual or real positioner axis connected to the current controller.

Input
- SystemID : Receives robot controller data.
Output
- ARM1&PLATE1_Info : Outputs the axis values of ARM1 and PLATE1 of the positioner.
- PLATE_Pl : Outputs the table plane position value of the positioner.
- ARM1_Pl : Outputs the position value of the ARM1 axis plane of the positioner.
How To Use
- The following is an example you may encounter when using the ReadAndWriteMOCData component.