ABBRobot
🌐 EN
Description
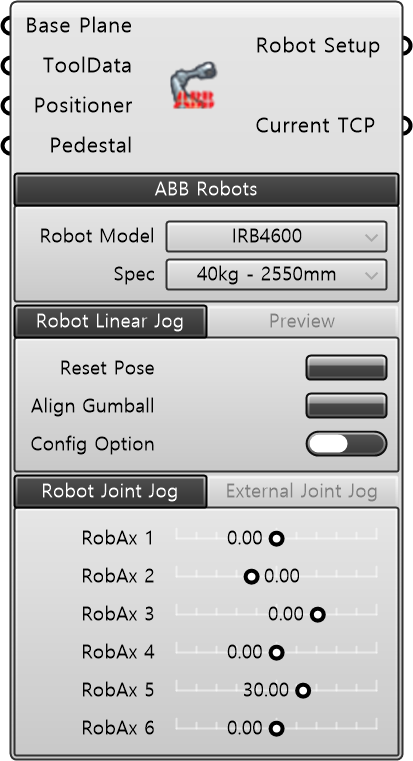
사용할 ABB 로봇 정의. 컴포넌트 아이콘 우클릭, [Show joint Jog Params]을 선택하여 선택한 로봇의 각 축을 설정할 수 있음. ABB IRB 시리즈 카탈로그의 사전 정의된 제원에서 선택.
| 입력(Input)
| 이름 | 타입 | 설명 |
|---|---|---|
| Base Plane | Plane | 로봇 베이스 좌표계 평면. 기본값: WorldXY. |
| ToolData | ToolData | 로봇에 적용할 ABB 툴 데이터(ToolData) |
| Positioner | Positioner | 로봇과 연동할 외부축 포지셔너 (Positioner). |
| Pedestal | Mesh | 로봇 받침대·작업대 등 주변 환경 메시 (선택). |
| 필수 파라미터 (Required Parameter)
| 이름 | 타입 | 설명 |
|---|---|---|
| Robot Model | String | ABB 로봇 모델 |
| Spec | String | 선택한 ABB 로봇 모델 스펙 — 가반하중 (kg) 및 작업 반경 (mm) |
| 이름 | 타입 | 설명 |
|---|---|---|
| Reset Pose | Button | 로봇 자세 초기화 |
| Align Gumball | Button | 현재 TCP 방향에 가장 가까운 World 좌표축(±X, ±Y, ±Z)과 평행하게 TCP를 정렬. ABB FlexPendant Jogging의 Align 기능과 동일. |
| Config Option | Toggle | • TRUE: cfx = 1. 로봇 축 4, 6의 구성(Configuration) 반전 • FALSE: cfx = 0 기본값 |
| 이름 | 타입 | 설명 |
|---|---|---|
| Color | Color | 시각화 색상 |
| 이름 | 타입 | 설명 |
|---|---|---|
| RobAx 1 | Number | 로봇 1번 축 |
| RobAx 2 | Number | 로봇 2번 축 |
| RobAx 3 | Number | 로봇 3번 축 |
| RobAx 4 | Number | 로봇 4번 축 |
| RobAx 5 | Number | 로봇 5번 축 |
| RobAx 6 | Number | 로봇 6번 축 |
| 이름 | 타입 | 설명 |
|---|---|---|
| ExtAx 1 | Number | 부가축 1번 |
| ExtAx 2 | Number | 부가축 2번 축 |
| ExtAx 3 | Number | 부가축 3번 축 |
| ExtAx 4 | Number | 부가축 4번 축 |
| ExtAx 5 | Number | 부가축 5번 축 |
| ExtAx 6 | Number | 부가축 6번 축 |
| 출력(Output)
| 이름 | 타입 | 설명 |
|---|---|---|
| Robot Setup | Robot Setup | 구성된 로봇 셋업. 베이스·툴·포지셔너·주변 모델이 묶인 로봇 정의. |
| Current TCP | Plane | 로봇 셋업의 현재 TCP 평면. |