Analysis
🌐 KR
Description
- Analysis is a component that analyzes and outputs the robot error postures and index values generated by the Core Solver. It allows users to identify the locations where robot errors occur.
Input
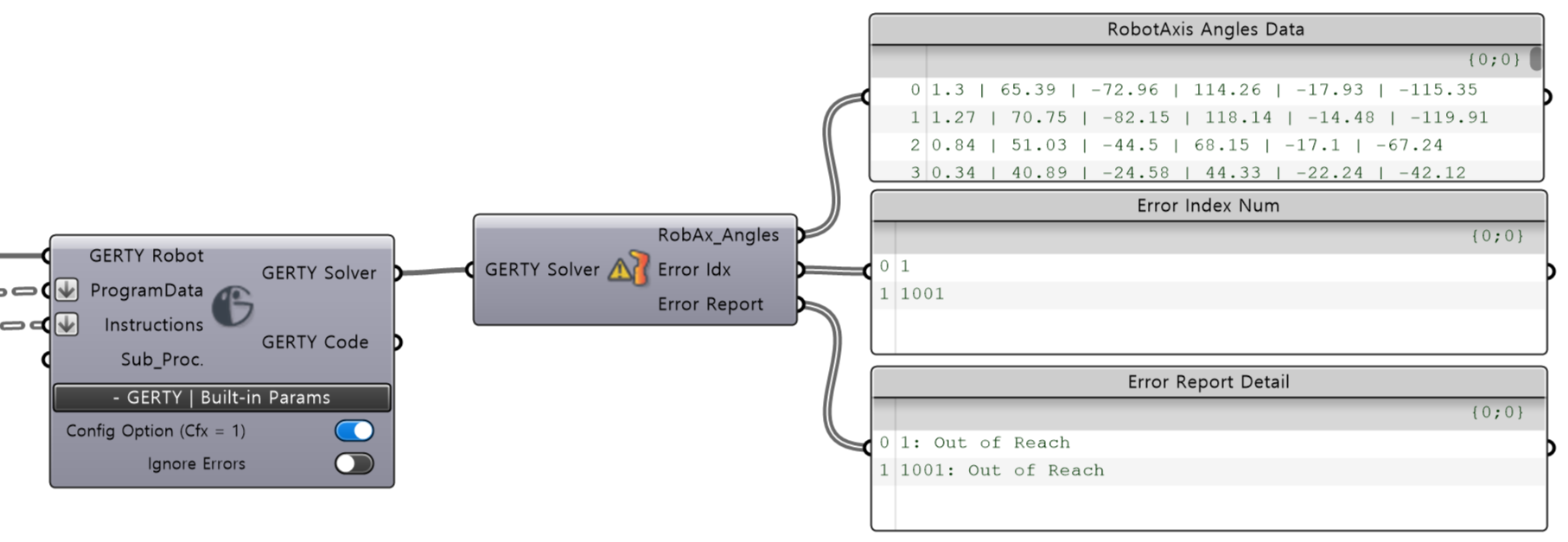
- GERTY Solver : Connects the
GERTY Solvervalues to the component.
Output
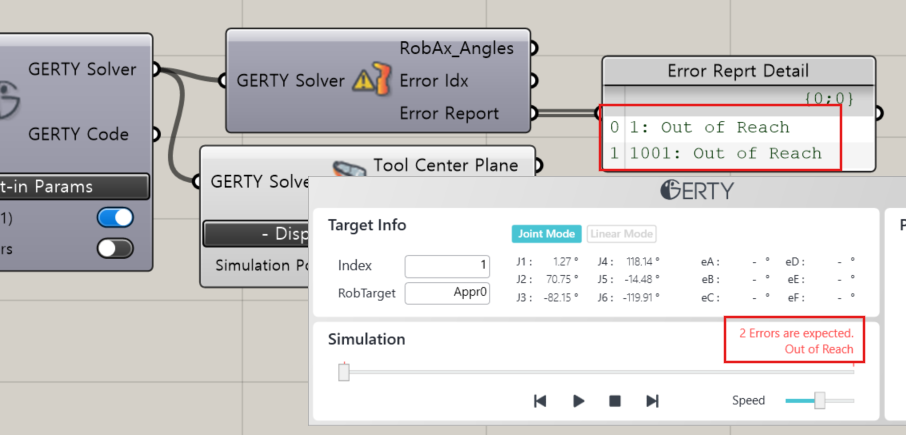
- RobAx Angle: Outputs the robot joint indices and corresponding angle values.
- Error Idx: Outputs the index values where robot errors have occurred.
- Error Report: Outputs detailed information regarding the causes of the errors.