PathAccLim
🌐 KR
Description
- This component defines the PathAccLim Instruction, which reduces the TCP’s movement speed. It limits the robot’s acceleration (AccLim) or deceleration (DecelLim) to reach the Target Point position.
Input
- RobTargets : Receives data from RobTargets.
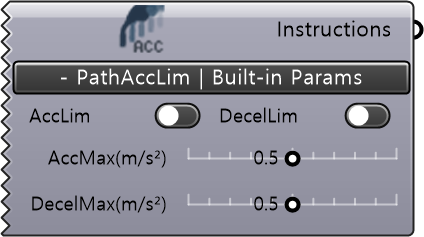
Built-in Param | Basic Params
- AccLim [Boolean] : Asks whether acceleration is enabled. Default is False.
- DecelLim [Boolean] : Asks whether deceleration is enabled. Default is False.
- AccMax(m/s2) : Inputs the maximum acceleration value.
- DecelMax(m/s2) : Inputs the maximum deceleration value.
Output
- Instructions : Outputs the defined PathAccLim Instructions based on the entered Input.
Example
Here is an example of using the PathAccLim component:
Example 1
- PathAccLim TRUE \AccMax := 4, TRUE \DecelMax := 4; TCP acceleration and TCP deceleration are limited to 4 m/s2.
Example 2
- PathAccLim FALSE, FALSE; The TCP acceleration and deceleration is reset to maximum (default).