Move
🌐 KR
Description
- To facilitate TCP movement, this component defines the Move Instruction by receiving RobTarget data. The movements for each target can be configured with Type, Speed, and Zone options.
Input
- RobTargets : Receives the data of RobTargets.
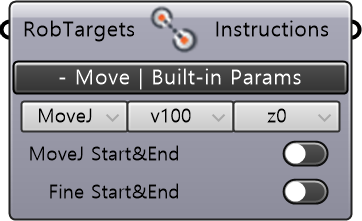
Built-in Param | Move
- MoveJ : Move Joint, where the robot reaches the Target Plane in regular kinematics, interpreted as the optimal posture.
- MoveL : Move Linear, where the robot reaches the Target Plane in inverse kinematics from a user-defined posture, finding the shortest path.
- Speed : Sets the speed (velocity) in mm/s at which the RobTarget is reached.
- Zone : Specifies a radius around the Target Point. When moving to the next Target Point, the movement is controlled by filleting with a size proportional to the zone value. This ensures precise passage through the point, while potentially affecting the robot’s constant speed motion.
Output
- Instructions : Outputs the defined Move Instructions based on the entered Input.