RobTarget
🌐 KR
Description
- RobTarget is a component used to define a robot’s position. It generates RobTarget data based on user-defined ToolPath Plane inputs.
A RobTarget contains information such as the position and orientation of the robot’s TCP (Tool Center Point) along a planned motion path
Reference : ABB RAPID Instructions Documentation (Document ID: 3HAC050917-001)
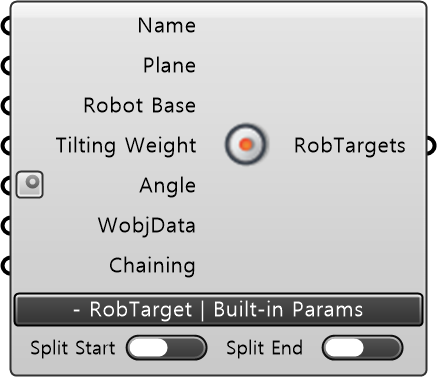
Input
- Name [Text/Item]: Enter the base variable name for the RobTarget to be created. (Default: “P”)
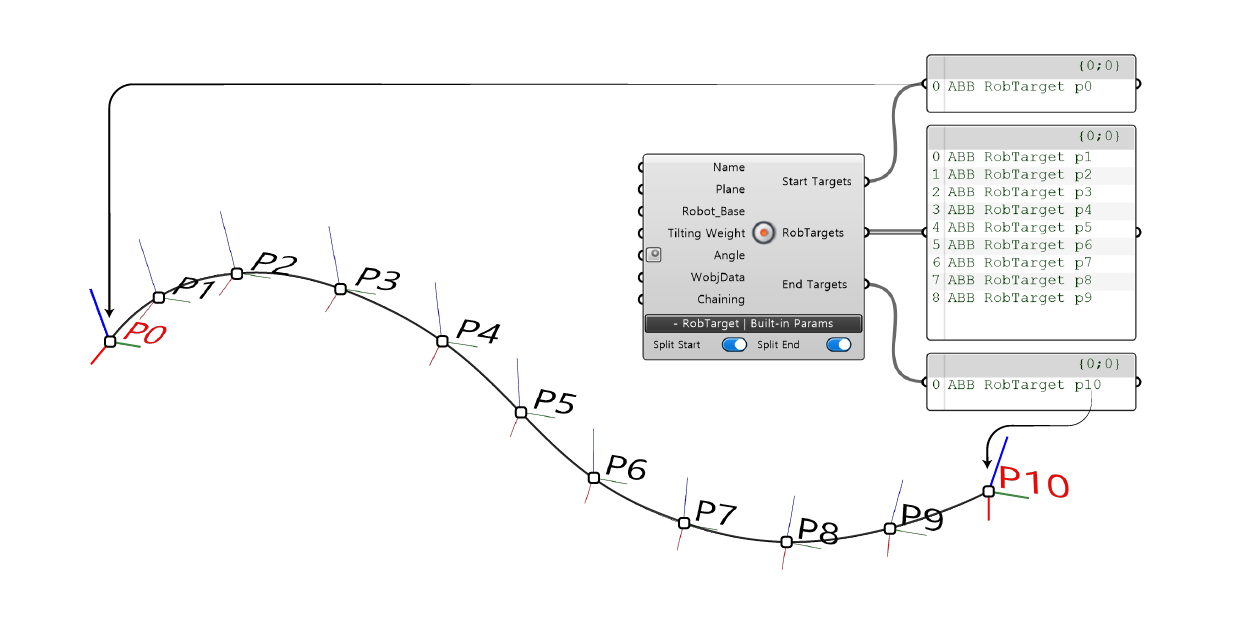
- The component assigns names to the generated RobTargets based on the number of input Plane data, following the format:
"VariableName 0, VariableName 1, VariableName 2, …".
- The component assigns names to the generated RobTargets based on the number of input Plane data, following the format:
-
Plane [Plane/DataTree]: Input the Plane to be converted into the ABB RobTarget format. (Default: WorldXY)
-
Robot_Base [Plane/Item]: Input the Plane to be converted into the ABB RobTarget format.
- Tilting Weight [Number/Item]: Set the tilting weight value between the BasePlane and the ParameterPlane as the reference for the TargetPlane.
- Angle [Number/Item] : The input Plane is uniformly rotated by the specified Angle (Degree) value and then applied to the RobTarget.
- WobjData [WObjData/Item] : Input the ABB WorkObject (WobjData), which represents the work coordinate system. The converted RobTarget is defined in relative coordinates based on the User Frame of the provided WobjData.
- Chaining [Boolean/Item] : If set to True, the relationship between the input WobjData and RobTarget is forcibly maintained. This means that if the User Frame defining the WorkObject is moved or rotated while WobjData is provided, the output RobTarget will also move or rotate accordingly, maintaining its relationship with WobjData.
Built-in Param : Basic Params
- Split Start : If the generated RobTarget consists of two or more items in a List/DataTree, the first RobTarget is separated and output through a dedicated Output node.
- Split End : If the generated RobTarget consists of two or more items in a List/DataTree, the last RobTarget is separated and output through a dedicated Output node.
Output
- RobTargets : The ProgramData of the RobTargets in each section is output. Then, this data is connected to the Instructions.