RobTarget
🌐 EN
Description
- RobTarget(Robot Target)은 로봇의 위치를 정의할 수 있는 컴포넌트로 사용자가 정의한 ToolPath Plane 데이터를 이용해, RobTarget 데이터를 정의한다. RobTarget은 계획한 이동 경로 위에서, 로봇 TCP(Tool Center Point) 의 위치(Position) 와 방향(Orientation)의 정보 등을 포함한다.
참고자료 : ABB RAPID Instructions Documentation (Document ID: 3HAC050917-001)
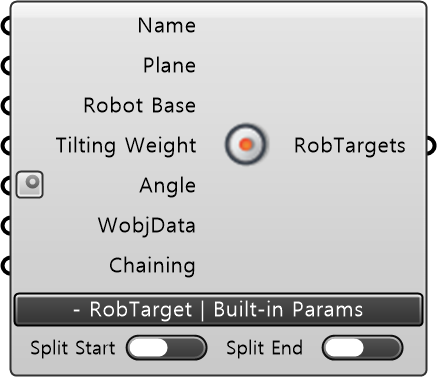
Input
- Name [Text/Item] : 생성할 RobTarget의 기본 변수명을 입력함. (기본값: “P”)
컴포넌트는 입력된 Plane 데이터 개수에 따라, 생성되는 RobTarget 이름을 “변수명 0, 변수명 1, 변수명 2, …“ 과 같은 방식으로 할당. - Plane [Plane/DataTree] : ABB RobTarget 형식으로 변환할 Plane을 입력.(기본값: WorldXY)
- Robot_Base [Plane/Item] : ABB RobTarget 형식으로 변환할 Plane을 입력.
- Tilting Weight [Number/Item] : TargetPlane의 기준을 BasePlane과 ParameterPlane 사이의 Tilting weight 값을 설정한다.
- Angle [Number/Item] : 입력된 Plane을 일괄적으로 Angle(Degree) 값만큼 회전시켜, RobTarget에 적용.
- WobjData [WObjData/Item] : ABB WorkObject (작업 좌표계)객체를 입력. 변환되는 RobTarget을 입력된 WobjData의 User Frame 기준 상대 좌표로 정의함.
- Chaining [Boolean/Item] : True인 경우, 입력되는 WobjData와 RobTarget간의 관계를 강제로 유지. 즉, WobjData가 입력된 상태에서 Workobject를 정의하는 UserFrame을 이동/회전하는 경우, 출력되는 RobTarget도 WobjData와의 관계에 따라 이동/회전됨.
Built-in Param : Basic Params
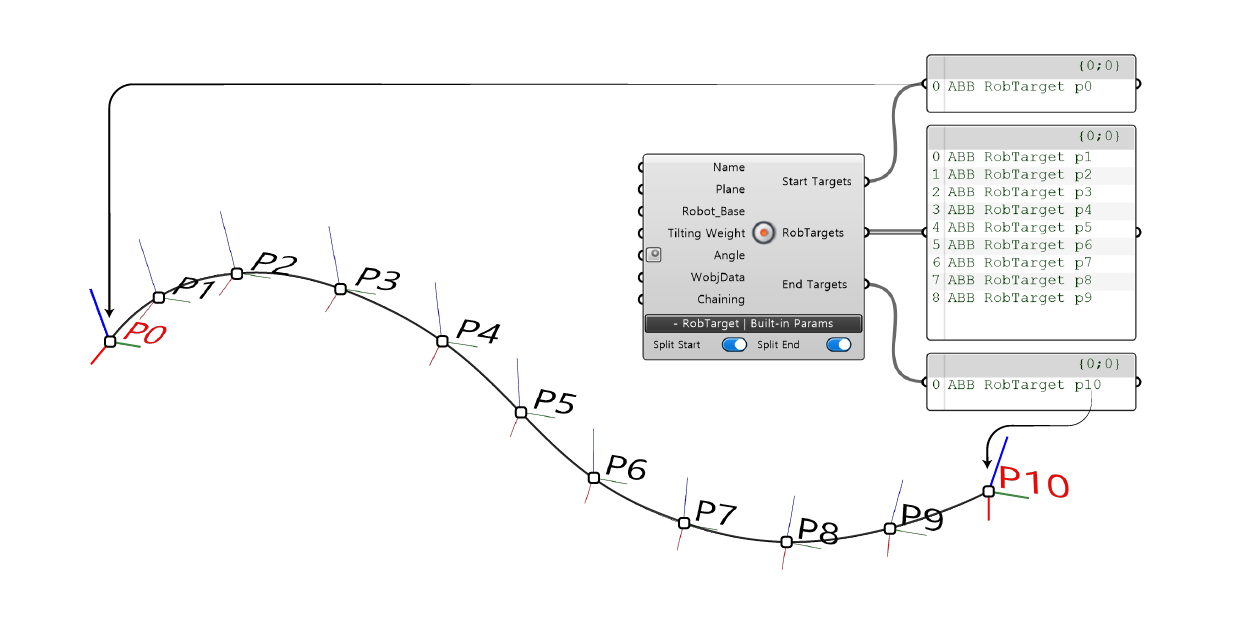
- Split Start : (생성된 RobTarget이 2개 이상으로 구성된 List / DataTree인 경우) 별도 Output node를 통해, 첫 번째 RobTarget을 분리하여 내보냄.
- Split End : (생성된 RobTarget이 2개 이상으로 구성된 List / DataTree인 경우) 별도 Output node를 통해, 마지막 RobTarget을 분리하여 내보냄.
Output
- RobTargets : 각 영역의 Robtargets의 ProgramData를 출력한다. 이후, 해당 데이터를 Instructions에 연결한다.