ABBRobot
🌐 EN
Description
- ABB 산업용 로봇을 관리하는 컴포넌트이다. 사용자는 ABB 스물다섯 기종 중, 해당되는 산업용 로봇을 선택하여 시뮬레이션에 적용할 수 있다.
Input
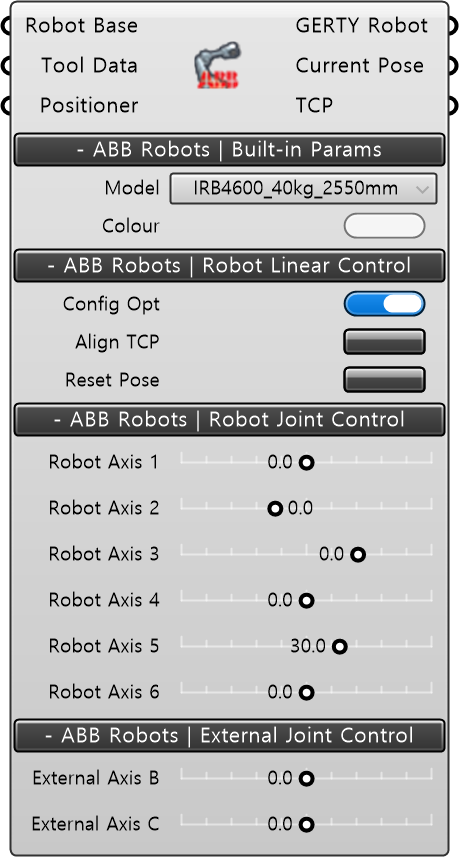
- Robot Base [Optional] : 로봇의 OrientPlane으로, 기본값으로 World Base Plane을 갖는다.
- Tool Data : ToolData의 입력값을 갖는다.
- Positioner [Optional] : 부가축 로봇 데이터를 연결한다.
ABB Robots | Built-in Params
- Model : ABB 산업용 로봇 모델을 선택한다.
- Display Colour : 로봇 색상을 변경한다.
ABB Robots | Robot Linear Control
- Config Opt : 로봇의 4번 6번 축의 회전값을 180도만큼 반전시킨다.
- Align TCP : Tool TCP의 Z-Axis를 가까운 방향으로 정렬한다.
- Reset Pose : 로봇의 기본 자세로 변경한다.
ABB Robots | Robot Joint Control
- Robot Axis 1 : 로봇 모델의 1번축을 설정(-180° to 180°)할 수 있습니다.
- Robot Axis 2 : 로봇 모델의 2번축을 설정(-90° to 150°)할 수 있습니다.
- Robot Axis 3 : 로봇 모델의 3번축을 설정(-180° to 75°)할 수 있습니다.
- Robot Axis 4 : 로봇 모델의 4번축을 설정(-400° to 400°)할 수 있습니다.
- Robot Axis 5 : 로봇 모델의 5번축을 설정(-125° to 120°)할 수 있습니다.
- Robot Axis 6 : 로봇 모델의 6번축을 설정(-400° to 400°)할 수 있습니다.
ABB Robots | External Joint Control
- Robot Axis 1 : 로봇 모델의 1번축을 설정(-180° to 180°)할 수 있습니다.
- Robot Axis 2 : 로봇 모델의 2번축을 설정(-180° to 180°)할 수 있습니다.
Output
- GERTY Robot : 설정한 로봇 정보를 출력한다.
- Current Pose : 로봇 모델의 현재 자세에서의 각 축의 각도값을 출력한다.
- TCP : 로봇 모델에 장착 된 툴의 TCP정보를 출력한다.