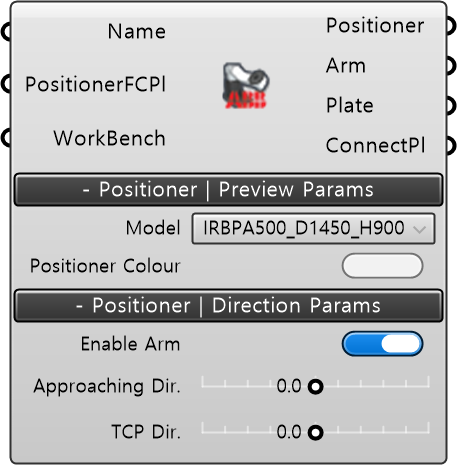
Positioner
🌐 KR
Description
- This is a component that allows for user-defined modeling of ABB Positioner models.
Input
- Name [Text] : Allows setting a unique name for the Positioner. If not set, the default value will be STN1.
- PositionerFCPL [Plane]: Stands for Positioner Flange Center Plane, allowing you to input the center plane of the positioner flange.
- WorkBench [WorkBench Data] : Allows you to input the workbench modeling for the Positioner.
Built-in Param : Preview Params
- Model : Specifies the positioner model.
- Positioner Colour : Redefines the color of the positioner model.
Built-in Param : Vector Params
- Enable Arm : Allows you to lock the position of the positioner. By default, the positioner arm is unlocked.
- Approaching Dir. : Redefines the direction of the approach path to the positioner.
- TCP Dir. : Redefines the direction of the TCP (Tool Center Point) approach to the positioner.
Output
- GERTY Positioner : Exports the information of the user-defined positioner.
- Arm : Exports the coordinate values of the current position of the robot arm.
- Plate : Exports the coordinate values of the current plane of the robot workbench.
- ConnectPl : Outputs the coordinate plane linking the robot workbench and the positioner.