IndReset
🌐 KR
Description
IndResetis a component that recalculates and reassigns the positioner’s joint angles to the nearest feasible configuration based on the selected optimization mode. Supported modes includeShort,Forward, andBackward, each providing a different strategy for minimizing angular displacement. Additionally, the resulting angles can be constrained or guided using a user-definedRefDegreeparameter for more controlled posture resetting.
Input
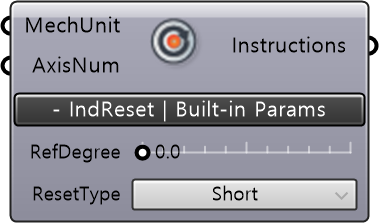
- MechUnit : Specifies the name of the actual positioner robot. (Default is STN1)
- AxisNum : Specifies the index of the axis to be reset.
Built-in Param | IndReset
- RefDegree : Defines the target angle value for resetting. The positioner’s current posture will be redefined to the nearest possible configuration relative to this angle.
- ResetType : Determines the angle reset strategy based on the selected option. (Refer to the table for details)
| ResetType | Description |
|---|---|
| Short | 가장 짧은 각도 값으로 현재 축 각도 값 재정의. |
| Fwd | 현재 축 각도 값을 360도로 나눈 나머지 각도 값 기준으로 재정의, i.e., Angle % 360. |
| Bwd | 현재 축 각도 값을 360도로 나눈 나머지 각도값을 360도에서 뺸 값을을 기준으로 재정의360° - (Angle % 360). |
Output
- Instructions : Outputs a IndReset instruction defined based on the given input conditions.