Positioner
🌐 EN
Description
- ABB Positioner 기종 모델링을 사용자 정의할 수 있는 컴포넌트이다.
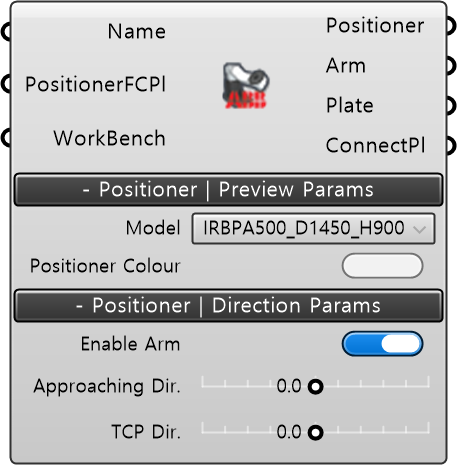
Input
- Name [Text] : Positioner 고유이름을 설정할 수 있다. 설정하지 않을 경우, 기본값으로 STN1으로 출력된다.
- PositionerFCPL [Plane]: Positioner Flange Center Plane의 약자로, 포지셔너 플랜지의 센터 플래인을 넣을 수 있다.
- WorkBench [WorkBench Data] : Positioner의 workbench 모델링을 넣을 수 있다.
Built-in Param : Preview Params
- Model : 포지셔너 모델을 지정한다.
- Positioner Colour : 포지셔너 모델의 색을 재정의한다.
Built-in Param : Vector Params
- Enable Arm : 포지셔너의 자세를 고정시킬 수 있다. 기본설정은 포지셔너 암 고정이 해제 되어있다.
- Approaching Dir. : 포지셔너에 접근하는 경로의 방향을 재정의한한다.
- TCP Dir. : 포지셔너에 접근하는 TCP의 방향을 재정의 재정의한한다.
Output
- GERTY Positioner : 사용자 정의 된 포지셔너의 정보를 내보낸다.
- Arm : 로봇 암 현재 자세의 좌표값을 내보낸다.
- Plate : 로봇 작업대의 현재 Plane의 좌표값을 내보낸다.
- ConnectPl : 로봇 작업대와 포지셔너가 연결된 좌표 평면을 출력한다.