WorkbenchImporter
🌐 KR
Description
- This component is for loading tool information extracted through the Workbench Exporter. It includes official BAT tools and can also load user-defined tool information. The Workbench Importer component has two modes: “Get Workbench Data” and “Get Workbench Input Data.” In the “Get Workbench Data” mode, it provides complete Workbench information, which can be used as a substitute for the Workbench component. In the “Get Workbench Input Data” mode, it provides editable information that can be combined with the Workbench component to utilize customized data.
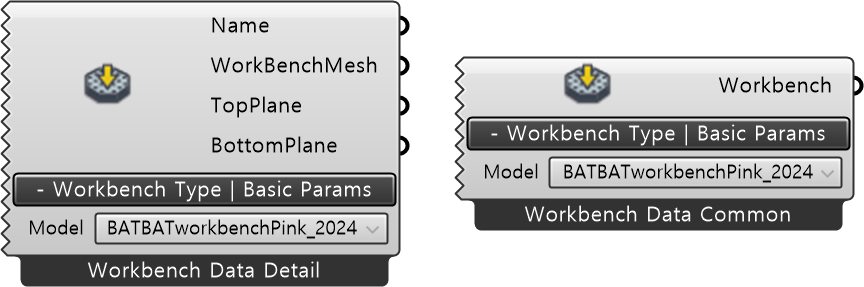
Built-in Param | Basic Params
- Model : GERTY retrieves the selected tool information by checking the list of tool information stored in the repository.
Output
Get Tool Data - Mode
- Tool Data : The entered tool name (Name), tool modeling (Mesh), flange (Base Plane), TCP, Mass, Centroid, and Inertia values are exported as Tool Data.
Get Tool Data Input - Mode
- Name [String] : Exports the entered tool name.
- Tool Geometry [Mesh] : Exports the entered tool modeling (Mesh).
- Base Plane [Plane] : Exports the tool base plane that attaches to the robot’s sixth flange.
- TCP [Plane] : Exports the Tool Center Plane (TCP) value of the tool.
- Mass [Double] : Exports the mass information of the tool.
- Centeroid [Generic Number] : Exports the tool’s center of mass value (e.g., in the form of 0,0,0).
- Inertia [Generic Number] : Exports the tool’s moment of inertia value (e.g., in the form of 0,0,0).