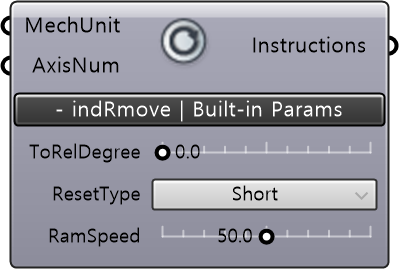
IndRMove
🌐 KR
Description
IndRMoveis a component that moves the positioner to a new joint angle based on the selected option and redefines its posture accordingly. Supported options includeShort,Forward, andBackward, each influencing the movement direction and angle resolution. The final angle can also be redefined using a specifiedToRelDegreevalue to guide the reset behavior.
Input
- MechUnit : Specifies the name of the actual positioner robot. (Default is STN1)
- AxisNum : Specifies the index of the axis to be reset.
Built-in Param | IndRMove
- ToRelDegree : Sets the target angle for resetting. The axis will be rotated and redefined to the nearest possible configuration relative to the current posture.
- ResetType : Determines how the angle is redefined based on the selected option. (Refer to the table for details)
- RamSpeed : Specifies the acceleration/deceleration speed (as a percentage) when moving toward the defined target angle.
| ResetType | Description |
|---|---|
| Short | 가장 짧은 각도 값으로 현재 축 각도 값 재정의. |
| Fwd | 현재 축 각도 값을 360도로 나눈 나머지 각도 값 기준으로 재정의, i.e., Angle % 360. |
| Bwd | 현재 축 각도 값을 360도로 나눈 나머지 각도값을 360도에서 뺸 값을을 기준으로 재정의360° - (Angle % 360). |
Output
- Instructions : Outputs an IndRMove instruction defined according to the specified input conditions.