WobjData
🌐 KR
Description
- WobjData is a component that defines the internal work object of a robot. It allows transforming the position of the internal work object from WobjData to a user-defined UserFrame, and can be adapted to the robot’s model and additional axes by changing to Fixed WobjData and MovableData.
Input
- Name [Text] : Enter the variable name for the UserFrame.
- UserFrame [Plane] : Set the Base Plane.
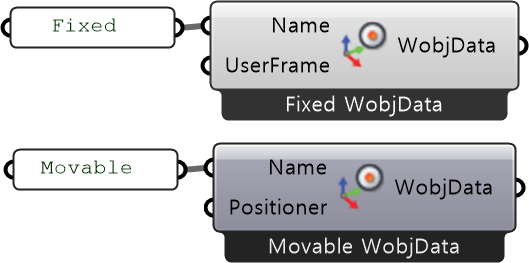
Felxible Option
- Fixed WobjData : Redefines the Target Plane relative to a stationary reference coordinate system.
- Movable WobjData : Redefines the Target Plane relative to a movable (dynamic) reference coordinate system.
Output
- WobjData : Outputs the defined WobjData.