WeaveData
🌐 EN
Description
- weavedata는 아크 용접 중 수행되는 모든 위빙 동작을 정의하는 데 사용된다. 위빙은 용접 이음부의 가열(heat) 및 용접(weld) 단계에서 사용할 수 있다.
Input
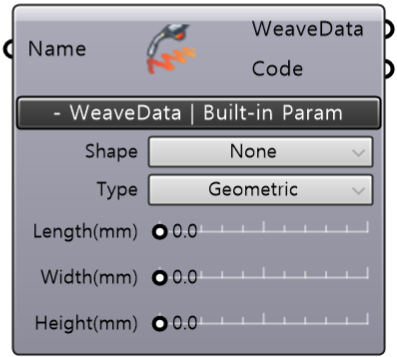
- Name : WeaveData의 변수 이름을 설정한다.
Built-in Param | WeaveData
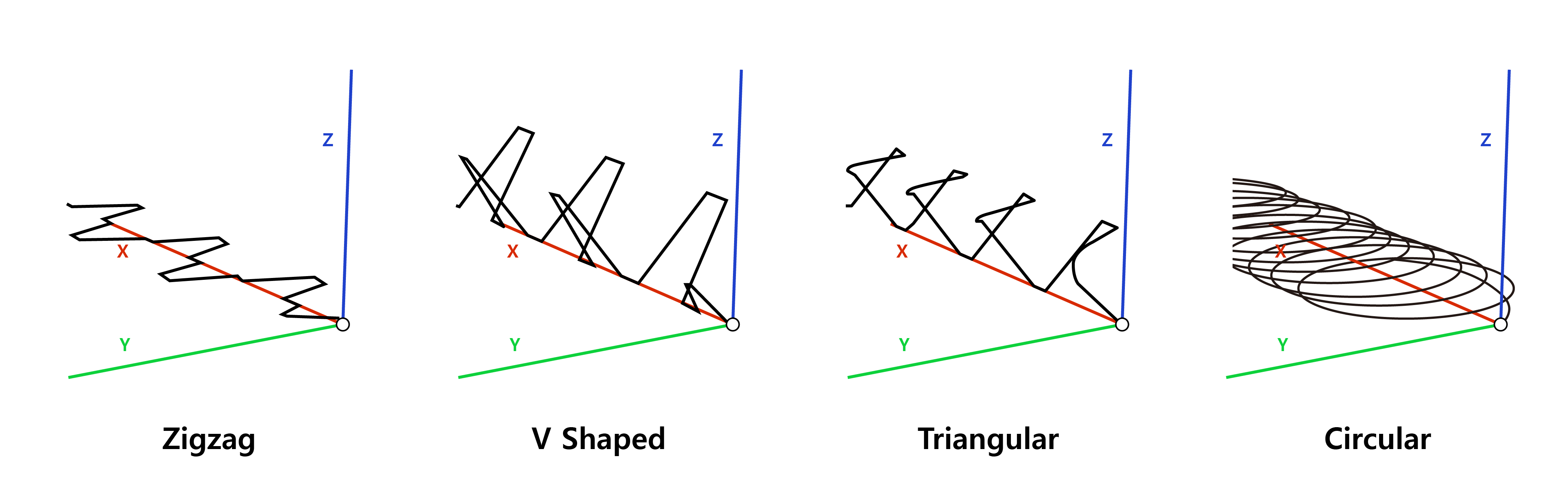
- Shape : 용접 형상을 설정한다. 옵션 값은
None,ZigZag,V-Shaped,Triangular,Circular가 있다.
- Type : 용접 위빙 타입을 설정한다. 옵션 값은
Geometric,Wrist,Rapid_1,Rapid_1가 있다.- Geometric: 기하학적 위빙. 모든 축을 사용하여 위빙을 수행한다.
- Wrist: 손목 위빙. 손목 관절을 사용하여 위빙을 수행한다.
- Rapid_1: 빠른 위빙. 1, 2, 3축을 사용.
- Rapid_2: 빠른 위빙. 4, 5, 6축을 사용.
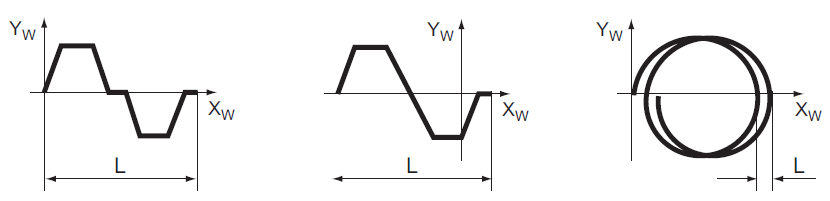
- Length(mm) : weave_length 컴포넌트가 위빙 유형 0과 1에서 용접 단계 동안의 하나의 위빙 사이클 길이로 정의된다.
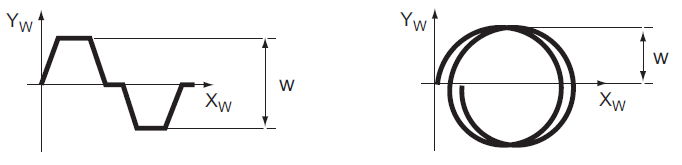
- Width(mm) : 폭은 위빙시 사이클의 너비를 의미하며, 해당 너비를 설정한다.
- Height(mm) : 높이는 위빙시 로봇이 들어올리는 높이로, 해당 높이를 설정한다.
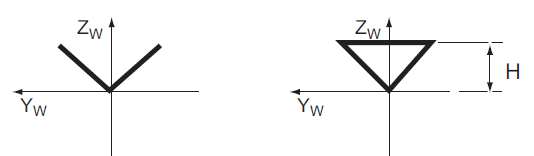
Image Source: ABB Robotics Documentation (© ABB, 2004–2018)
Output
- WeaveData : 설정한 용접 위빙 데이터를 WeaveData로 치환해 내보낸다.
- Code : 설정한 용접 위빙 데이터를 코드로 전환한 데이터로, 사용자는 실제 용접 값 설정을 사전에 확인할 수 있다.