ToolImporter
🌐 EN
Description
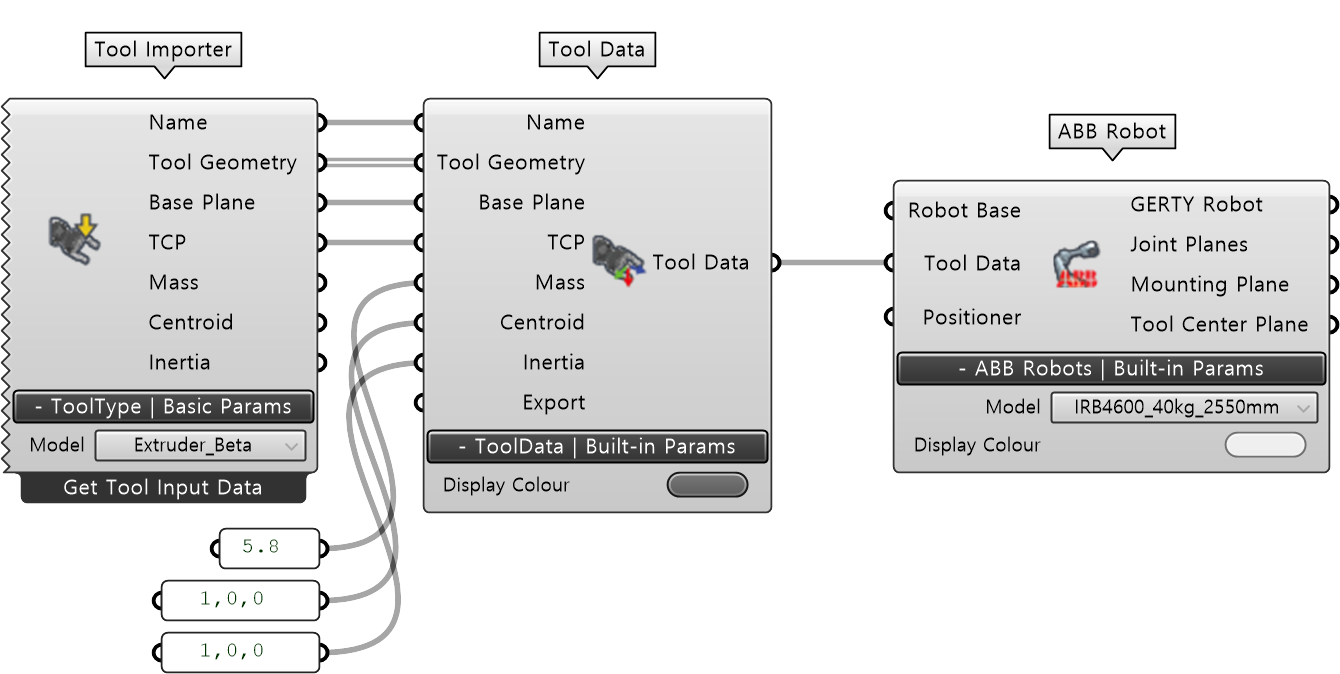
- Tool Importer 컴포넌트는 “Get Tool Data” 모드와 “Get Tool Data Input” 모드가 있으며, 전자의 경우 완전한 툴 정보값으로 Robot 컴포넌트의 Tool Data 입력값으로 사용할 수 있다. 후자의 경우 불완전한 툴 정보값으로 Tool Data 컴포넌트의 입력값으로 활용할 수 있다.
Input
Built-in Param | Basic Params
- Model : GERTY 저장소에 있는 툴 정보 리스트를 확인하여 선택한 툴 정보를 불러온다.
Output
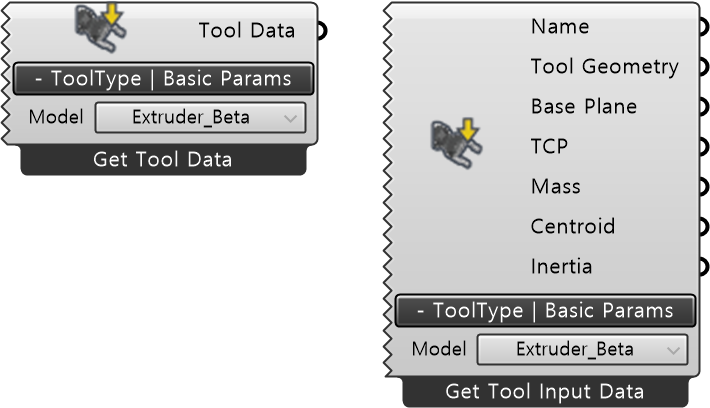
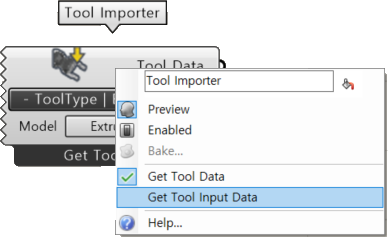
- ToolImporter 컴포넌트는 GET TOOL DATA와 GET TOOL DATA INPUT, 두가지 옵션 모드가 있다.
- GET TOOL DATA 모드일 경우, 로봇 컴포넌트에 다이렉트로 연결하여 사용이 가능하다.
- GET TOOL DATA INPUT 모드의 경우, 툴 상태를 수정하여 사용이 가능하다.
1. Get Tool Data
- Tool Data : 입력된 툴 이름(Name), 툴 모델링(Mesh), 플랜지(Base Plane), TCP, Mass, Centeroid, Inerta값을 Tool Data로 내보낸다.
2. Get Tool Data Input
- Name [String] : 입력한 툴 이름을 내보낸다.
- Tool Geometry [Mesh] : 입력한 툴 모델링(Mesh)을 내보낸다.
- Base Plane [Plane] : 로봇 6번 플랜지에 장착 되는 툴 바닥면 Plane을 내보낸다.
- TCP [Plane] : 툴의 Tool Center Plane 값을 내보낸다.
- Mass [Double] : 툴의 Mass 정보를 내보낸다.
- Centeroid [Generic Number] : 툴의 무게중심 값을 내보낸다. (e.g., 0,0,0 값의 형태)
- Inertia [Generic Number] : 툴의 관성모멘트 값을 내보낸다. (e.g., 0,0,0 값의 형태)